ปัจจุบันประเทศไทยมีผู้ป่วยติดเตียงที่ไม่สามารถช่วยเหลือตนเองได้ จากโรคอัมพฤกษ์ อัมพาต หรือพาร์กินสัน ในอัตราผู้ป่วย 63,000 คน ต่อประชากร 1 ล้านคน และเนื่องจากผู้ป่วยไม่สามารถช่วยเหลือตัวเองได้ จึงจำเป็นต้องมีอุปกรณ์อำนวยความสะดวกสำหรับการเคลื่อนย้ายผู้ป่วย เช่น รถเข็นคนพิการ และต้องมีผู้ดูแลอย่างใกล้ชิด ด้วยเหตุนี้นักศึกษาสาขาวิชาวิศวกรรมเครื่องกล หลักสูตรอุตสาหกรรมศาสตรบัณฑิต คณะครุศาสตร์อุตสาหกรรม มหาวิทยาลัยเทคโนโลยีราชมงคล (มทร.) พระนคร ได้แก่ นายสุกฤษฎิ์ ชม้ายกลาง และนายอิศรา จันทปัญญา จึงได้มีแนวคิดในการออกแบบรถเข็นเคลื่อนย้ายผู้ป่วยแบบเดินตาม สำหรับการควบคุมระยะไกล เพื่อเป็นการอำนวยความสะดวกและลดภาระผู้ดูแลผู้ป่วย ในการเคลื่อนย้ายผู้ป่วยติดเตียง ในพื้นที่โรงพยาบาล หรือสถานดูแลผู้ป่วย โดยไม่จำเป็นต้องใช้แรงเข็นรถ และช่วยให้ผู้ที่ดูแลมีความสะดวกสบายมากยิ่งขึ้น โดยเฉพาะกรณีผู้ป่วยมีน้ำหนักตัวมาก โดยมี ดร.วิชชา อุปภัย และอาจารย์ไกรศักดิ์ โพธิ์ทองคำ เป็นอาจารย์ที่ปรึกษาโครงการ
นายอิศรา กล่าวว่า การออกแบบรถเข็นเคลื่อนย้ายผู้ป่วยฯ มีจุดมุ่งหมายเพื่อใช้ในสถานพยาบาลที่จำเป็นต้องดูแลผู้ป่วย เพื่อเป็นการลดภาระหน้าที่ของทีมงานในการเคลื่อนย้ายผู้ป่วย เนื่องจากข้อจำกัดของรถเข็นทั่วไปต้องใช้แรงคนในการเข็น หรือตัวผู้ป่วยเองต้องใช้มือในการออกแรงผลักล้อเพื่อบังคับทิศทางเคลื่อนที่ไปยังจุดหมายต่าง ๆ
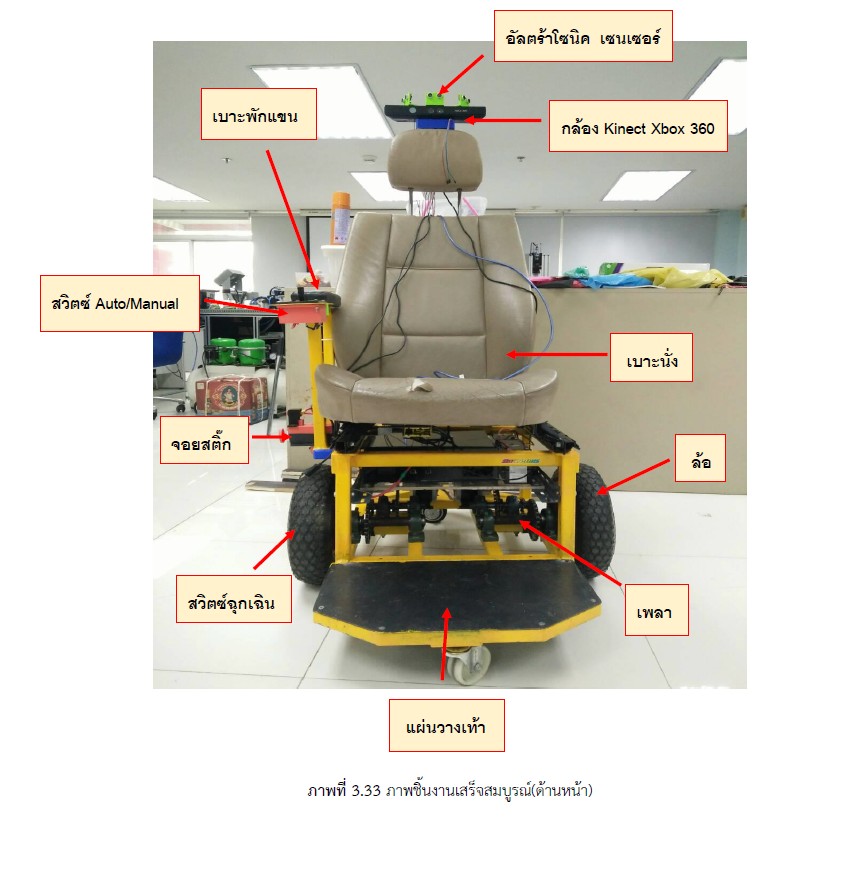
อีกทั้งรถเข็นไฟฟ้าในท้องตลาดราคาค่อนข้างสูง และการใช้งานค่อนข้างยากยังไม่ตรงกับความต้องการการใช้งานที่แท้จริง ทั้งนี้รถเข็นผู้ป่วย การทำงานเป็นแบบควบคุมอัตโนมัติ (Automatic Control) โดยใช้กล้อง Kinect Xbox 360 ร่วมกับเซ็นเซอร์อัลตราโซนิค ในการตรวจจับการเคลื่อนไหวหรือสิ่งกีดขวาง ทำหน้าที่เปรียบเสมือนดวงตาของมนุษย์ในการวัดระยะห่างในการเดินตามระหว่างตัวรถเข็นกับผู้ดูแลผู้ป่วย ส่วนตัวควบคุมเป็นชนิดฟัซซีลอจิก (Fuzzy Logic Controller) ทำหน้าที่เปรียบเสมือนสมองเพื่อทำการตัดสินใจให้รถเข็นผู้ป่วยขับเคลื่อนไปยังจุดหมายที่ต้องการ ประมวลผลผ่านโปรแกรม LabVIEW และส่งสัญญาณควบคุมไปยังบอร์ด Arduino เพื่อทำการขับเคลื่อนล้อในการเดินตาม
นายสุกฤษฎิ์ กล่าวว่า สำหรับโครงสร้างตัวรถเข็นกว้าง 500 มิลลิเมตร ยาว 658 มิลลิเมตร สูง 305 มิลลิเมตร รูปแบบการขับเคลื่อนเป็นแบบสองล้ออิสระต่อกัน น้ำหนักตัวรถรวม 50 กิโลกรัม ใช้แหล่งพลังงานจากแบตเตอรี่ 12 โวลต์ จำนวน 2 ก้อน ทั้งนี้การทดลองได้ทำการทดสอบการเก็บข้อมูล ได้แก่ การทดสอบการเคลื่อนที่ในแนวเส้นตรง การทดสอบการเลี้ยวหมุน 360 องศา การทดสอบการเคลื่อนที่ขึ้นทางลาดชัน และการทดสอบการเคลื่อนที่ผ่านสิ่งกีดขวาง โดยจากผลการทดสอบการทำงานพบว่ารถเข็นผู้ป่วยสามารถทำความเร็วสูงสุดได้ที่ 3 กิโลเมตร/ชั่วโมง ขึ้นทางลาดชันได้ 17 องศา และข้ามสิ่งกีดขวางสูงสุด 3 เซนติเมตร มีระยะการควบคุมไม่เกิน 120 เมตร
และสามารถรับน้ำหนักผู้ป่วยได้สูงสุด 120 กิโลกรัม โดยผลสรุปการทดสอบปรากฏว่ารถเข็นผู้ป่วยสามารถเดินตามได้ดี การเคลื่อนที่ทางตรงของรถเข็นผู้ป่วยในระยะ 10 เมตร ใช้เวลา 17 วินาที ความเร็วของคนเดินและรถเข็นอยู่ที่ 0.58 เมตร/วินาที และสามารถหยุดรถเข็นโดยผู้เดินนำเพียงลดความเร็วในการเดินจนรถหยุดนิ่ง


ด้าน ดร.วิชชา กล่าวเสริมว่า รถเข็นผู้ป่วยนี้ยังเป็นตัวต้นแบบที่จะต้องมีการพัฒนาให้มีความสมบูรณ์ ทันสมัย แม่นยำ และรองรับการใช้งานได้หลากหลายขึ้น โดยในอนาคตจะทำการปรับปรุงตัวรถเข็นให้ใช้งานได้ง่ายยิ่งขึ้น ด้วยการนำคอมพิวเตอร์อุตสาหกรรมหรือคอมพิวเตอร์ขนาดเล็กมาใช้ควบคุมแทนคอมพิวเตอร์โน๊ตบุ๊คที่ใช้ในการ ทดสอบปัจจุบัน และเพิ่มขีดความสามารถของรถเข็นให้สามารถสร้างแผนที่ และมีระบบการนำทางด้วยตัวเอง รวมทั้งนำระบบปัญญาประดิษฐ์หรือ AI เข้ามาช่วยในการควบคุมการสั่งการเพื่อให้รถเข็นเดินทางไปในจุดต่าง ๆ ที่ต้องการได้โดยไม่ต้องอาศัยผู้เดินนำทางหรือผู้ดูแลอีกด้วย
“รู้สึกภูมิใจที่นักศึกษากระตือรือร้นนำความรู้ในห้องเรียนที่ทำการสอน ไปประยุกต์ใช้ในการสร้างสรรค์ผลงานต่าง ๆ และเมื่อจบการศึกษาไป นักศึกษาก็สามารถนำทฤษฎีตรงนี้ไปประยุกต์ใช้ในการทำงานได้อย่างมีประสิทธิภาพ สมกับเป็นนักวิศกรอุตสาหกรรมมืออาชีพตามปณิธานในการผลิตบัณฑิตของหลักสูตร ทั้งนี้ผมจะสอนนักศึกษาตลอดว่า ทำแล้วไม่สำเร็จไม่เป็นไร เพราะทำให้เราได้ประสบการณ์และความรู้จากความไม่สำเร็จนั้นเพื่อนำมาปรับปรุงแก้ไขต่อไป อีกทั้งวันนี้ที่เรียนได้อะไรจากที่เรียน และจะมีประโยชน์อะไรในอนาคต ดีใจที่สิ่งที่สอนทำให้นักศึกษามองเห็นอนาคตของตัวเขาเอง วิชาความรู้ก็เหมือนอาวุธติดตัวไปประกอบอาชีพหาเลี้ยงครอบครัวได้” ทั้งนี้ผู้ใดสนใจสอบถามข้อมูลเพิ่มเติมที่ สาขาวิชาวิศวกรรมเครื่องกล คณะครุศาสตร์อุตสาหกรรม มทร.พระนคร โทรศัพท์ 089 663 0472